2020-10 upd: we reached the first fundraising goal and rented a server in Hetzner for development! Thank you for donating !
Attention! I apologize for the automatic translation of this text. You can improve it by sending me a more correct version of the text or fix html pages via GITHUB repository.
Цели проекта
CBSD was developed in terms of user-friendly, taking into account the convenience for the user during interactive work. You may ask - well, interactive dialogs are wonderful. But what if you have the task of building a scalable cluster, where higher-level logic will manage the virtual machines, and for this reason, we don’t need interactive commands - can CBSD be useful for you in this case?
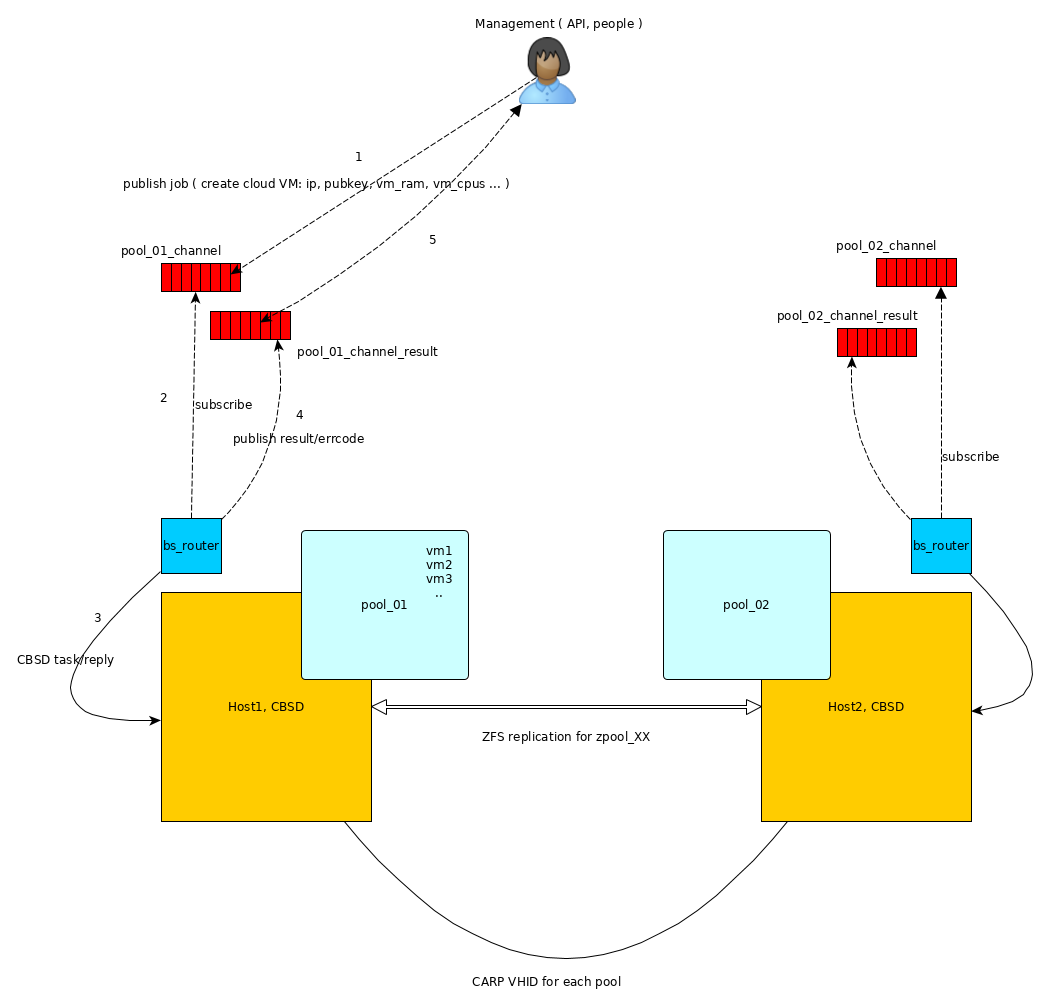
This article describes an example of creating and managing a CBSD cluster via an asynchronous interface using a minimalistic and fast net/beanstalkd broker. Instead of beanstalkd, any other broker can act, such as ActiveMQ, ZeroMQ, RabbitMQ or Kafka. By convention, let's call this a low level of virtual machine management, which provides delivery and return of results when managing virtual machines, such as creating a VM, adding a disk, creating a snapshot, migration, cloning, changing the VNC port, etc. At a higher level may be your application (controller).
Here we will use multiple CBSD workspaces, when some resources can be initialized in the separated directory.
This opens up great opportunities for building pool-binded methods for hosting virtual machines. Pool-binded cluster means that all services or virtual machines
of the cluster will be tied to one or another pool, which can move from one server to another in emergency situations, during DRS operation or equipment maintenance.
Thus, it can become the basis for building a 'shared nothing cluster' based on FreeBSD and CBSD.
The creation of a failover cluster will be described in a more extended article, here we will restrict ourselves to several CBSD working environments to demonstrate the operation of the asynchronous interface through an broker bus. We assume that CBSD is already installed and configured on the server. We need a beanstalkd service that acts as a shared bus for all agents. Let's put beanstalkd in jail on our server. To do this, create a jail with an arbitrary name in which beanstalkd will be launched, for example, bs1 (assign the container the correct working IP address, we need it):
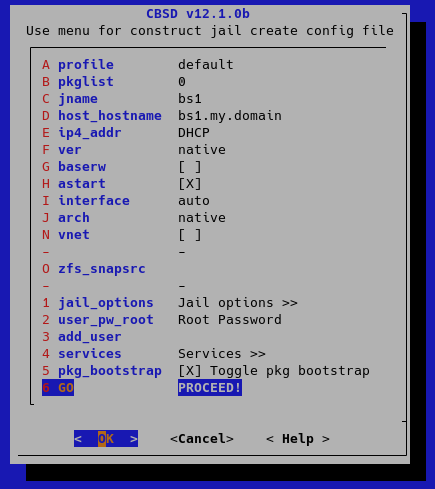
cbsd jconstruct-tui cbsd pkg jname=bs1 mode=update cbsd pkg jname=bs1 mode=install net/beanstalkd cbsd sysrc jname=bs1 beanstalkd_enable=YES cbsd jstart bs1
Then, we initialize two independent environments (in a real cluster, these can be different pools and, of course, there may be more), for example, in /pool1 and /pool2 directories:
env workdir=/pool1 /usr/local/cbsd/sudoexec/initenv
to the question of changing the rc.conf file, answer 'n', this initialization should not modify your main configuration files.
to the question of enabling NAT (nat_enable: Enable NAT for RFC1918 networks?) answer “no” - it should already work for you on the main system.
Repeat the same for the second environment:
env workdir=/pool2 /usr/local/cbsd/sudoexec/initenv
with similar answers.
Now, CBSD can work in these environments through the workdir variable, for example:
env workdir=/pool1 cbsd jconstruct-tui env workdir=/pool2 cbsd jconstruct-tui
etc..
Each environment will be served by a small agent (let's call it bs_router) which will connect to beanstalkd and process requests. Lets clone it:
cd /root git clone https://github.com/cbsd/bs_router.git /root/bs_router
The example is written in GO, so to build the project we need for golang:
pkg install -y lang/go
Build:
cd bs_router setenv GOPATH /root/bs_router go get go build cp -a bs_router /usr/local/sbin
Now copy the configuration file and adjust for each pool:
cp -a config.json /usr/local/etc/pool1.json cp -a config.json /usr/local/etc/pool2.json
In both files, please change:
- uri - instead of 127.0.0.1:1130, set IP address of bs1 jail, e.g: 172.16.0.3:1130 (if bs1 has IP 172.16.0.3)
- cbsdenv - for pool1.json config it will be pointed to /pool1, for pool2.json - /pool2
- tube - which pipe to subscribe to, for pool1.json config let it be "cbsd_pool1", and for pool2.json - cbsd_pool2
- reply_tube_prefix which pipe do we use for reply. For pool1.json let it be: cbsd_pool1_result_id, and for pool2.json - cbsd_pool2_result_id
Now start both agents with the configuration file via command line:
/usr/local/sbin/bs_router -config /usr/local/etc/pool1.json /usr/local/sbin/bs_router -config /usr/local/etc/pool2.json
That's it, now everything that we will send to the beanstalk queue with the corresponding name and the corresponding payload in json format will be transmitted to CBSD and a response will be received.
As an example, we clone a client sample to our CBSD agent, which will connect to beanstalkd and send requests:
cd /root git clone https://github.com/cbsd/bs_router-client.git cd bs_router-client setenv GOPATH /root/bs_router-client go get go build
As a result, we got the bs_router-client binary file, which can now be used to send and receive tasks to different CBSD environments. Take a look at the bin.jail and bin.bhyve directories for examples of use.
When working with cloud images, it makes sense to first 'warm up' all the cloud images so that the creation of the first virtual machine does not slow down the process, for example, for pool1 this can be done like this:
env workdir=/pool1 cbsd fetch_iso keepname=0 conv2zvol=1 cloud=1 dstdir=default
After this command, you can use the result of executing the scripts /root/bs_router-client/bin.bhyve/bcreate.sh and /root/bs_router-client/bin.bhyve/bstart.sh without delay.